AZ GTi is NOT a mount for astro photography. Thus, even you set the mount as EQ mode, it may not be suitable for guiding. Especially, Basklash of RA axis is too large to respond fast when moving direction changes.
I measured backlash. It is about 60 arc-second. It takes about 4 second to go through backlash at sidereal speed. If guide speed is x0.25, it takes 16 second, then it may end up with guide error.
Therefore, I came up with the idea to compress the backlash.
That is backlash compression.
Quickly move backlash zone in about 0.2 second, then compress the response delay.
Considering amount of compression
First, I try to use encoder step of AZ GTi, because AZ GTi has enough precision encoder. However, it count up step even within backlash period. Anyway, it may be difficult to use encoder step value to measure or control backlash amount.
If backlash compress is over-acting, that cause another guide error. Thus, correction must be equal or less then real backlash amount.
In addition, backlash amount is not always constant. Therefore, a little less than minimum backlash, and keep delay less than 1 second, must be appropriate solution.
Consume backlash, but it may over-react when backlash is less.
Safe but correction may not enough
May cause over-react movement
Consume most of backlash
Little margin to adopt backlash variation, not to over-react
Measurement of backlash
Because I do not have very precise measurement equipment that can measure arc-second level, I came up with following method.
I can see a building, that is about 480 meter (=525 yards) according to a map. I went to the building and measured narrow side of tile, that is 4.7 cm (=1.85 inches)
I magnify as maximum I can with my telescope parts at home, I could see 9-tiles in sight.
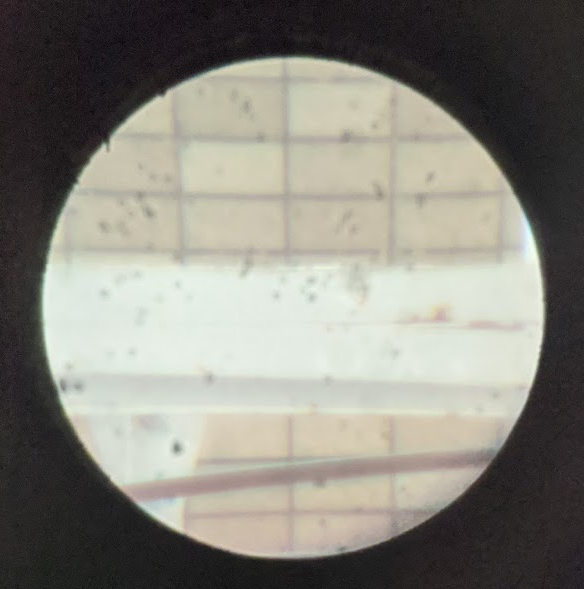
Tile grating helps me to certainly judge if it Moved or Not moved.
I can say it moved if movement is more than 1/4 of tile narrow side.
According to calculation, the resolution of this is about 5 arc-second.
atan (0.047m * (1/4) / 480.0m) = 0.0000244791667(rad)
= 0.001402553(degree)
= 5.049190569(arc-sec)
Next, I fixed movement time duration to 250 msec, then change move speed. I wrote a program it only move 250 msec on my pushing button.
First, move the other direction, then start moving setting speed by 250 msec.
If sight moved on first push, that means backlash compression excess backlash.
If movement occur on second or later push, Backlash compression is under real backlash.
Assume, one time push cause A(arc-second), then Not moved until N-time’s push. Then, Movement occur on (N+1) push,
Real backlash B(arc-second) must be between following.
A * N < B < A * (N+1)
Backlash may differ by axis position or weight balance, so it is important to measure smallest backlash.
Thus, I measured 3 times each for following conditions.
– 4 Dec-axis position, Clamp screw is top(0 deg), right(90 deg), bottom(180 deg) and left(270 deg).
– DEC Positive direction and Negative direction
– Speed is x3, x4, x5, x6, x7, x8, x8, and x10 of sidereal speed.
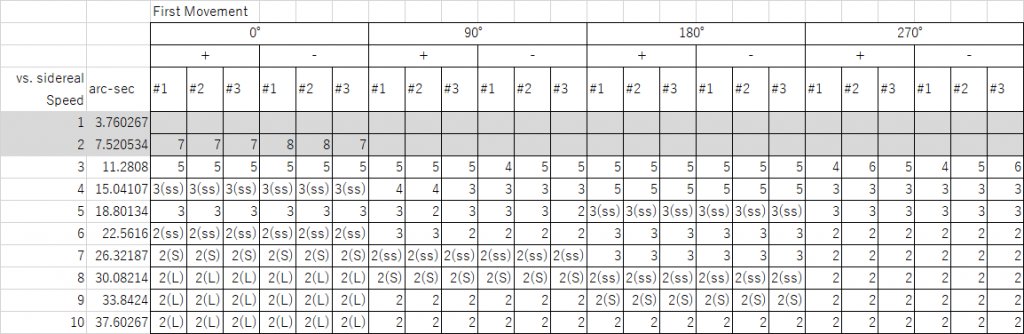
(S) Small Movement
(ss) Very small Movement.
– Possibly RA-Shift
Make it graph
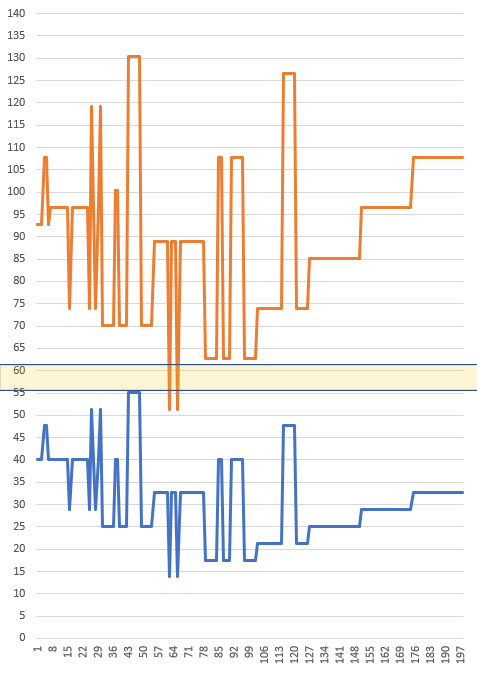
X-axis is measurement
Y-axis is arc-second
On each X position, real backlash must be somewhere between Orange and Blue.
As conclusion, real backlash must be about 55 to 62 arc-second according to this experiment.
I also noticed that weight balance made it difference between positive and negative direction.
[Note]
There are some irregular values where Orange line go into rectangle. I will describe it following section.
Another Issue founded
I realized that, when backlash is over and start moving, there are very slight movement in RA axis, even though I move DEC motor only.
Irregular values in my experiment, I sometimes noticed very slight movement (where I marked “ss” in experiment result above) and that made irregulars.
Movement in RA direction is about 1/4 to 1/3 of tile’s narrow side. Thus, it should be about 2 arc-seconds.
Directions of DEC axis movement and shift in RA axis are always same, and move like this.
I was told that this blog found same issue and propose solution.(Blog is in Japanese)
M87JETのブログ
These Tweets shows how to replace AZ GTi’s paper ring with plastic or metal ring, to remove this movement.
It looks that “RA shift” occur when backlash is over and start movement.
Should I do something on this?
If Backlash compression too fast, this RA shift could cause rapid movement in RA axis, and end with over react in RA axis.
I tried to remove this, by giving slight counter movement in RA axis.
However, because DEC backlash is not always same, counter action easily can be too fast or too late.
Too early or too late, both cause rapid movement in RA axis. That is not good.
My solution to this issue is follwoing.
・Do not make any counter action to RA-Shift in DEC backlash compression process
・Keep DEC backlash compression little smaller than real backlash value. Then RA-shift will be slow and Autoguider can handle it.