AZ GTiはそもそも写真用の架台ではないので、写真用途の性能はそもそも期待できない。
その中でも赤緯軸のバックラッシュが大きくて、回転方向が変わるときになかなか戻ってこないという情報がいろいろ報告されているようです。
簡単に計測してみたところ、AZ GTiのバックラッシュは60秒角程度もあり、恒星時(15秒角)駆動でもバックラッシュ区間を通り過ぎるのにおよそ4秒かかる計算になります。x0.5 倍速ガイドなら8秒、x0.25 倍速ガイドなら16秒!もかかり、とても実用的ではありません。
そこで、バックラッシュを少なくする方法を考えました。
それがバックラッシュ圧縮です。
それをバックラッシュを事前に測定しておいて、その区間を高速で(およそ0.2秒で)動かしてしまうことで、遅延時間を0.2秒にまで減少させるというアイデアです。
補正量の考察
AZ GTiにはそれなりの精度のエンコーダが搭載されていますが、、、、エンコーダの値を読んで制御しようとしましたが、、、、どうもエンコーダはモーターの側に居るのか、バックラッシュの間も進んだことになっている。
これではバックラッシュ量の計測や制御ができない。
バックラッシュ補正量を多くし過ぎると、過剰補正になってしまい、オートガイドが暴れる原因になるので、適正か若干アンダー気味にする必要がある。
(追記)
位置や軸周りの荷重によって、バックラッシュに幅があるので、ぎりぎりに設定すると過剰補正になるリスクがある。そのため、若干アンダーにして、補正でバックラッシュを「ほぼ」解消して、トータルの遅延を1秒程度に抑える、というのが理想的に思える。
過ぎたるは及ばざるが如し
バックラッシュの大半を消費
少し余裕を残すことで
1.バックラッシュのばらつきによる過剰補正の防止
2.赤経ずれが発生する最後の区間をゆっくり通過させる
バックラッシュ量の計測
AZ GTiのバックラッシュ量を計測するのに秒角単位で測れる計測器が無い。AZ GTiにレーザーを積んで、100m先の定規にレーザーを当てて、、なども考えたけどそれほどのレーザー強度と、狭い拡散角のレーザーもない。それに精密に角度を読むというのは誤差の大きい方法しか思いつかない。
そこで発想の転換をして、間違いの少ない方法を考えた。
自宅からは遠くにマンションがいくつか見える。地図で確認すると、一番遠いマンションで約480メートル。外壁はタイル模様になっていて、現地に行ってみるとタイルの短辺は約4.7㎝。
家にあるパーツを組み合わせて望遠鏡の像を最大限拡大すると、タイル9個分が視野に入った。
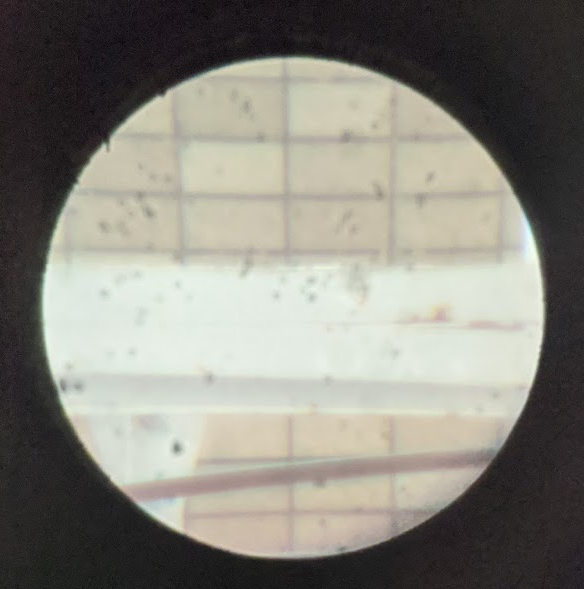
タイルは格子模様を描いているので、視野の端を見ると、
「動いたか、静止したままか」は確実に分かる。
タイル幅の1/4も動けば、揺れと間違うこともない。なので、動いたか動いてないか、判断できる分解能は計算するとおよそ5秒角となった。
atan (0.047m * (タイル幅の 1/4) / 480.0m) = 0.0000244791667(rad)
= 0.001402553(degree)
= 5.049190569(arc-sec)
次にバックラッシュ補正時間を250msecに固定、動かす速度を変えて、ボタンを押すごとに補正量だけ動かすプログラムを書く。これをAZ GTiに繋いで実験開始。
最初に反対方向に振って片側のギアを当てておく。次に順方向にバックラッシュ補正量だけ動かす。
1回目で視界が動いてしまうと、補正量が実際のバックラッシュ量を超えてしまったことになり、過剰補正と判断できる。
1回目で視界が動かないなら、補正量は実際のバックラッシュ量以下になる。
一回の補正量を A(秒角)として、順方向に続けて動かし、N回目までは動かず、(N+1)回目で動いた場合、実際のバックラッシュ量 B は
A * N < B < A * (N+1)
であることが分かる。
軸の向きによっての違いや、軸周りのバランスによってもことなるかもしれないので、事実上の最小バックラッシュ量を測る必要がある。
そこで、
・ 赤緯軸の位置 (クランプが上にあるとき、右にあるとき、下にある時、左にあるとき)それぞれ
・順方向のバックラッシュと、逆方向のバックラッシュ
・恒星時のx3倍速から、x4, x5, x6, x7, x8, x9, x10 (x2以下は計測分解能以下なのでしない)
・上記それぞれを3回ずつ測定
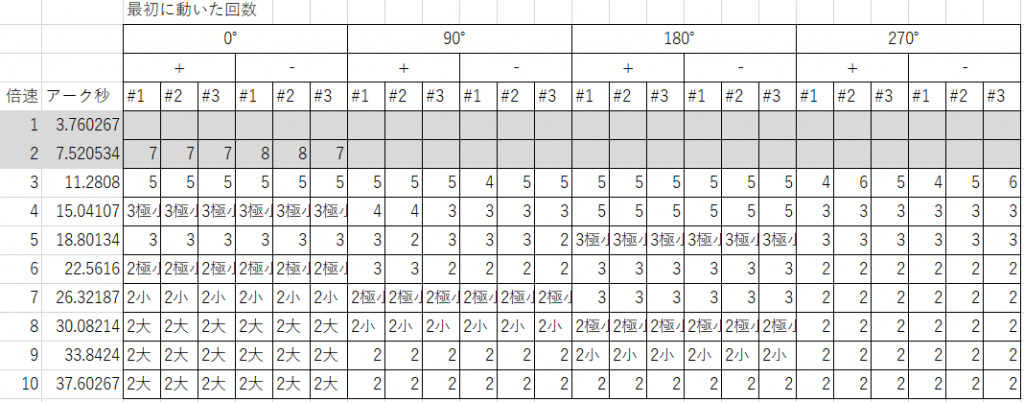
その結果をまとめたのがこちら。
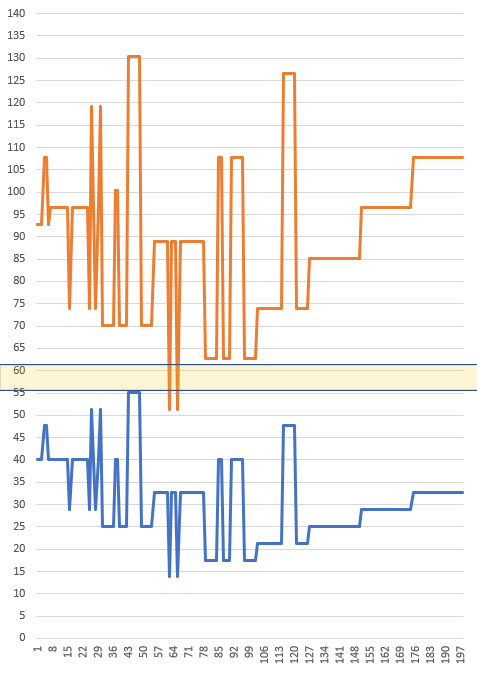
このグラフのX軸方向は試行回数。
縦軸は秒角。
各X軸で、青とオレンジの間のどこかに実際のバックラッシュがある。
結果を見ると、実際のバックラッシュはクリーム色の四角で囲んだ55秒角~62秒角のあたりにありそう。
軸周りに回転力が加わるような荷重の方よりがあると、当然ながら順方向と逆方向で若干変わることもあった。
※ オレンジがクリーム色の四角に食い込んでいる異常値があるが、これは後述。
さらなる問題
バックラッシュ測定をしていて気づいたが、バックラッシュ区間が終わって動き出すとき、赤緯軸を動かしているのに、なぜか赤経軸方向に微妙に動く。上位の異常値はこれを「動き」と思って記録していたぽい。記録で動きが「極小」て書いているところ。
移動量はタイルの幅の1/4から1/3程度なので、 2秒角くらい。
赤緯の移動方向と、赤経のずれ量方向は固定されていて、♮ の記号のような動きをする。
Twitterで書いていたら、こちらのブログ「M87JETのブログ」で解説と動画があるのを教えて頂いた。まさにこの動き。
他にもいろいろ情報を頂いて、中の不織布を金属やプラスチックのリングに替えれば良いなどの情報が集まる。Twitterすごい。
で、ノーマルのままのAZ GTiに対して、何とかなるのかなぁ。。。?
(追記)
この「赤経シフト」はバックラッシュが終わり、実際に動き出すところで一番大きく発生している。
補正をぎりぎりにし過ぎると、この「赤経ずれ」区間を高速で通り過ぎてしまうことになり、赤経方向に急激に動かしてしまう。
これを強制的に補完しようとしたが、すこしでもタイミングがずれるとこのようになってしまう。
ただ、場所や軸周りの荷重状態によってバックラッシュ量に幅があるので、完全に一致させることは不可能。
いずれにしても赤経方向に急な動きを発生させてしまうので、赤経軸側のオートガイドにとっても良くない。
結論としては、次のようになりました。
・赤経方向のずれは、「バックラッシュ補正」では補正しない
・オートガイドスピードでの赤経方向のずれ速度は比較的ゆっくりかつ一定量になるので、後は赤経軸のオートガイドに任せる